آموزش ربات ها برای حرکت در محیط های جدید دشوار است. شما می توانید آنها را بر روی داده های فیزیکی و دنیای واقعی که از ضبط های انجام شده توسط انسان ها گرفته شده است آموزش دهید، اما جمع آوری آن کمیاب و پرهزینه است. شبیهسازیهای دیجیتال راهی سریع و مقیاسپذیر برای آموزش انجام کارهای جدید به آنها هستند، اما رباتها اغلب زمانی که از دنیای مجازی خارج میشوند و از آنها خواسته میشود همان وظایف را در دنیای واقعی انجام دهند، شکست میخورند.
اکنون یک گزینه بالقوه بهتر وجود دارد: سیستم جدیدی که از مدلهای مولد هوش مصنوعی در ارتباط با یک شبیهساز فیزیک برای توسعه زمینهای تمرین مجازی استفاده میکند که با دقت بیشتری دنیای فیزیکی را منعکس میکند. رباتهایی که با استفاده از این روش آموزش دیدهاند، نسبت به رباتهایی که با استفاده از تکنیکهای سنتیتر آموزش دیدهاند، در آزمونهای واقعی به میزان موفقیت بیشتری دست یافتهاند.
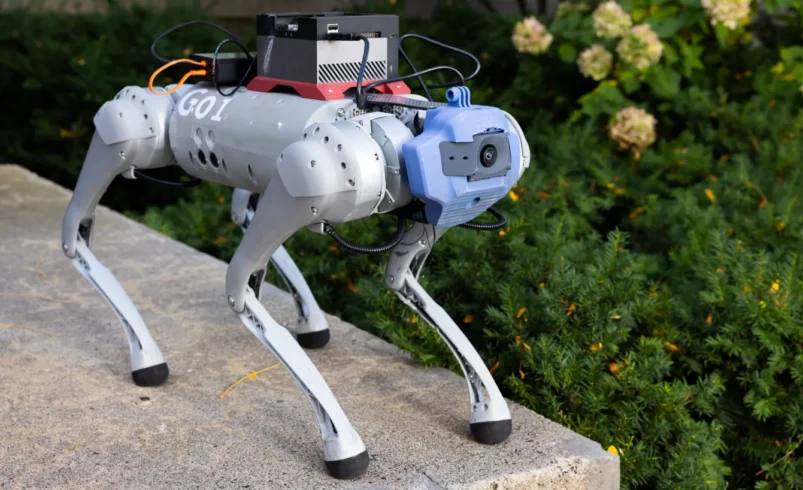
محققان از این سیستم موسوم به LucidSim برای آموزش یک سگ روباتی در پارکور استفاده کردند و او را وادار کردند تا از روی جعبه عبور کند و از پلهها بالا برود، حتی اگر هرگز دادههای دنیای واقعی ندیده بود. این رویکرد نشان میدهد که هوش مصنوعی مولد چقدر میتواند در آموزش انجام وظایف چالش برانگیز به روباتها کمک کند. همچنین این احتمال را افزایش می دهد که در نهایت بتوانیم آنها را در دنیای کاملا مجازی آموزش دهیم. این تحقیق هفته گذشته در کنفرانس یادگیری رباتی (CoRL) ارائه شد.
جی یانگ، فوق دکترای آزمایشگاه علوم کامپیوتر و هوش مصنوعی MIT که روی این پروژه کار میکرد، میگوید: «ما در میانه یک انقلاب صنعتی برای روباتیک هستیم. این تلاش ما برای درک تأثیر این مدلهای [هوش مصنوعی] خارج از اهداف اصلی آنهاست، با این امید که ما را به نسل بعدی ابزارها و مدلها هدایت کند.»
LucidSim از ترکیبی از مدلهای هوش مصنوعی برای ایجاد دادههای آموزشی بصری استفاده میکند. ابتدا محققان هزاران درخواست را برای ChatGPT ایجاد کردند و آن را مجبور کردند تا توصیفی از طیف وسیعی از محیطها ایجاد کند که بیانگر شرایطی است که ربات در دنیای واقعی با آن مواجه میشود، از جمله انواع مختلف آب و هوا، زمانهای روز و شرایط نوری. اینها شامل «کوچه ای باستانی مملو از چایخانه ها و مغازه های کوچک و عجیب بود که هر کدام زیورآلات سنتی و خوشنویسی را به نمایش می گذاشتند» و «خورشید چمنی تا حدی نامرتب را با تکه های خشک روشن می کند».
این توصیفات به سیستمی داده شد که هندسه سه بعدی و داده های فیزیک را بر روی تصاویر تولید شده توسط هوش مصنوعی ترسیم می کند و فیلم های کوتاهی را ایجاد می کند که مسیری را برای ربات ترسیم می کند. ربات از این اطلاعات استفاده می کند تا ارتفاع، عرض و عمق چیزهایی را که باید حرکت کند، مثلاً یک جعبه یا مجموعه ای از پله ها، مشخص کند.
محققان LucidSim را با دستور دادن به یک ربات چهار پا مجهز به وب کم برای انجام چندین کار، از جمله تعیین محل مخروط ترافیکی یا توپ فوتبال، بالا رفتن از یک جعبه و بالا و پایین رفتن از پله ها، آزمایش کردند. این ربات به طور مداوم بهتر از زمانی که سیستمی را اجرا می کرد که بر روی شبیه سازی های سنتی آموزش دیده بود، عمل کرد. در 20 آزمایش برای مکان یابی مخروط، LucidSim 100٪ درصد موفقیت داشت، در مقابل 70٪ برای سیستم های آموزش دیده بر روی شبیه سازی استاندارد. به طور مشابه، LucidSim در 20 آزمایش دیگر در 85٪ مواقع و فقط 35٪ برای سیستم دیگر به توپ فوتبال رسید.
در نهایت، زمانی که ربات LucidSim را اجرا می کرد، تمام 10 آزمایش پله نوردی را با موفقیت به پایان رساند، در حالی که این ربات برای سیستم دیگر تنها 50 درصد بود.
فیلیپ ایزولا، دانشیار دانشگاه MIT که بر روی این تحقیق کار کرده است، میگوید: اگر LucidSim مستقیماً از مدلهای ویدیویی مولد پیچیده بهجای ترکیبی از مدلهای زبان، تصویر و فیزیک استفاده کند، این نتایج احتمالاً حتی بیشتر در آینده بهبود خواهند یافت.
ماهی شفیع الله، دانشجوی دکترا در دانشگاه نیویورک که از مدلهای هوش مصنوعی برای آموزش روباتها استفاده میکند، میگوید: رویکرد محققان به استفاده از هوش مصنوعی مولد رویکرد جدیدی است که راه را برای تحقیقات جدید جالبتر هموار میکند. او روی پروژه کار نکرد.
او میگوید: «جهت جالبتری که شخصاً میبینم، ترکیبی از دادههای واقعی و واقعی است که میتواند به روشهای تشنه داده فعلی ما کمک کند تا سریعتر و بهتر مقیاس شوند.
Zafeirios Fountas، دانشمند تحقیقاتی ارشد در هوآوی که در زمینه هوش مصنوعی الهام گرفته از مغز متخصص است، میگوید: توانایی آموزش یک ربات از ابتدا صرفاً در موقعیتها و سناریوهای ایجاد شده توسط هوش مصنوعی، یک دستاورد قابل توجه است و میتواند فراتر از ماشینها و عوامل تعمیمیافتهتر هوش مصنوعی گسترش یابد.
اصطلاح «رباتها» در اینجا بهطور کلی استفاده میشود. ما در مورد نوعی هوش مصنوعی صحبت می کنیم که با دنیای واقعی در تعامل است.« من میتوانم تصور کنم که از این برای کنترل هر نوع اطلاعات بصری، از روباتها و ماشینهای خودران گرفته تا کنترل صفحهنمایش کامپیوتر یا گوشی هوشمند شما استفاده میشود.»
از نظر مراحل بعدی، نویسندگان علاقه مند به تلاش برای آموزش یک ربات انسان نما با استفاده از داده های کاملاً مصنوعی هستند، که آنها اذعان دارند که یک هدف بلندپروازانه است، زیرا روبات های دوپا معمولاً نسبت به همتایان چهار پا خود پایداری کمتری دارند. آنها همچنین توجه خود را به چالش جدید دیگری معطوف کرده اند؛ استفاده از LucidSim برای آموزش انواع بازوهای روباتیک که در کارخانه ها و آشپزخانه ها کار می کنند. وظایفی که آنها باید انجام دهند به مهارت و درک فیزیکی بسیار بیشتری نسبت به دویدن در اطراف یک منظره نیاز دارند.
ایزولا می گوید: «در واقع برداشتن یک فنجان قهوه و ریختن آن، مشکلی بسیار سخت و باز است. “اگر بتوانیم شبیه سازی را انجام دهیم که با هوش مصنوعی مولد تقویت شده است تا تنوع زیادی ایجاد کند و یک عامل بسیار قوی را آموزش دهیم که بتواند در یک کافه کار کند، فکر می کنم بسیار جالب خواهد بود.”
تحلیل
آموزش ربات ها برای حرکت در محیط های جدید دشوار است. میتوان آنها را با استفاده از دادههای فیزیکی و دنیای واقعی که از ضبط های انجام شده توسط انسان ها گرفته شده است آموزش داد. یکی از راه سریع برای آموزش کارهای جدید به رباتها شبیه سازیهای دیجیتال است. LucidSim سیستم جدیدی که از مدلهای مولد هوش مصنوعی در ارتباط با یک شبیهساز فیزیک برای توسعه زمینهای تمرین مجازی استفاده میکند. (LucidSim از ترکیبی از مدلهای هوش مصنوعی برای ایجاد دادههای آموزشی بصری استفاده میکند) که با دقت بیشتری دنیای فیزیکی را منعکس میکند. رباتهایی که با استفاده از این روش آموزش دیدهاند، نسبت به رباتهایی که با استفاده از تکنیکهای سنتیتر آموزش دیدهاند، در آزمونهای واقعی به میزان موفقیت بیشتری دست یافتهاند





نظر شما در مورد این مطلب چیه؟
ارسال دیدگاه